農業分野の人手不足が深刻化する中、ロボットの活用注目を集める中、大阪公立大学大学院工学研究科の藤永拓也助教は「ロボットによるトマト収穫の成功率を予測するモデル」を構築した。
インテリジェント農業ロボットの実現: トマトの収穫のしやすさの分析 – ScienceDirect
https://www.sciencedirect.com/science/article/pii/S2772375525007695

トマトの収穫のしやすさはロボットによって決まるのだろうか?収穫の成功確率を「見える化」する新技術の構築 |大阪公立大学
https://www.omu.ac.jp/info/research_news/entry-20534.html
RoboCrop: ロボットにトマトの収穫方法を教える
https://phys.org/news/2025-12-robocrop-robots-Tomatoes.html
農業分野ではロボットによる自動収穫のニーズが高まっていますが、作物によってはロボットによる自動収穫が難しい場合があります。特にトマトなどの房状に結実する作物は、熟度に応じてどの果実を収穫し、どの果実を残すかを判断したり、果実の周囲の構造を考慮したりする必要があるため、高度な判断力と管理能力が求められます。
そこで藤永氏は、画像認識と統計解析を用いて、トマト収穫ロボットが左、前、右のいずれから接近すれば収穫の成功率が高まるかを定量的に評価するモデルを構築した。
研究で使用されたトマト収穫ロボットは、温室内の植物工場に設置されたレール上を移動することができ、直線的に動く2本のアームと、柔軟に動く4本の多関節アームを備えていた。アームの先には3本の指でトマトを掴む装置があり、トマトとその周囲を撮影できるカメラも付いていた。
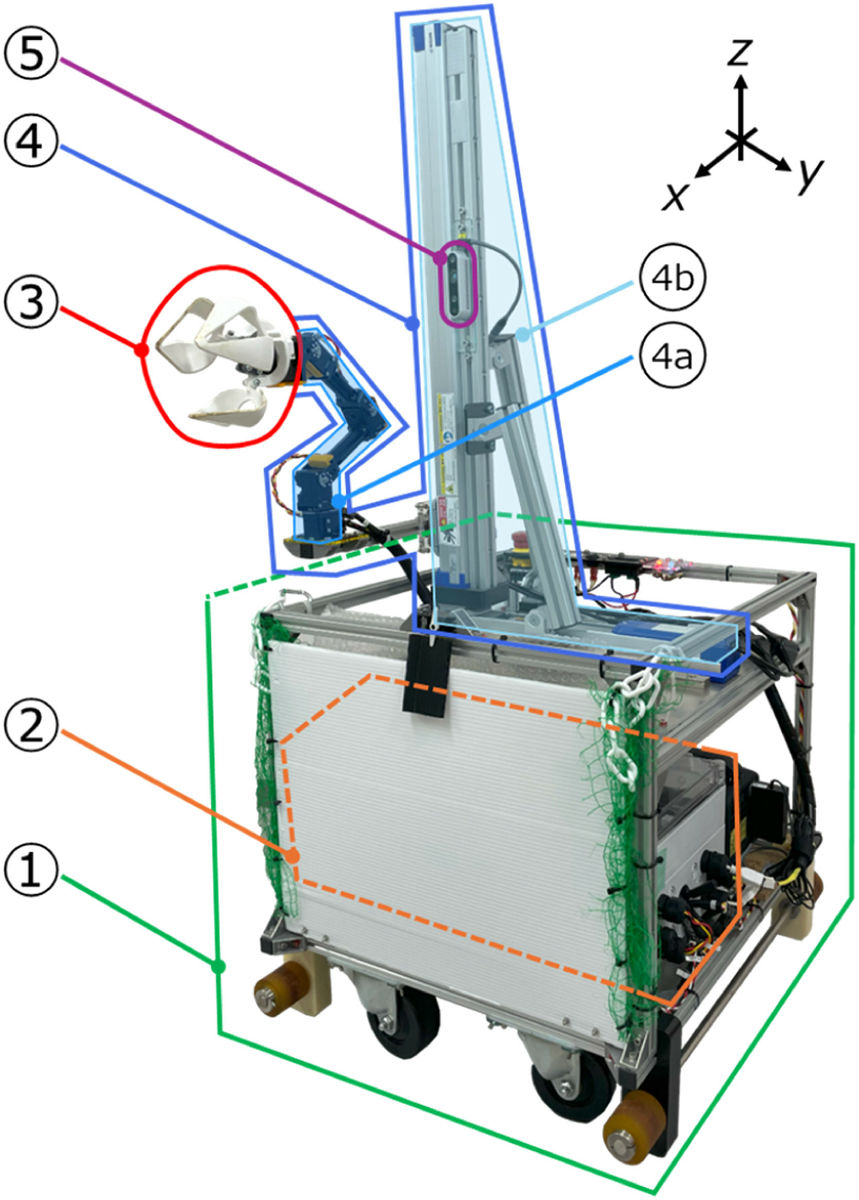
下の写真を見ると、両端に収穫用のトマトが並び、真ん中にロボットが移動できるレール(中央)が敷かれているのがわかります。

ロボットを使ってトマト100個を収穫する実験では、81個のトマトを収穫することができた。このうち、果実の正面から収穫したのは56個、右側から16個、左側から9個で、正面だけでなく左右からもアプローチすることで収穫成功率が高まることがわかった。
藤永氏は、実験で得られたデータをもとに、「トマトの前に障害物があると失敗しやすい」「トマトに取っ手があると成功しやすい」といった傾向を定量的に分析した。ロジスティック回帰この統計手法を使用して、画像から抽出したデータに基づいて収穫成功率を予測するモデルを構築しました。
新しいモデルにより、ロボットによるトマトの選択的収穫とより確実な収穫が可能になることが期待されています。藤永氏は、このモデルは従来の「検出・認識」モデルから「収穫可能性推定」モデルへの転換であると主張する。 「これは単に『ロボットはトマトを収穫できるのか?』という質問を超えています。 「収穫が成功する確率はどのくらいですか?」という質問に対してこれは現実の農業にとってより意味のある質問です」と彼は説明した。
この記事のタイトルとURLをコピーします